
-
แสงสูง
stepper มอเตอร์ rotary encoder
,เซ็นเซอร์แสงเซ็นเซอร์
-
Kaywordsเข้ารหัสแบบหมุนแสง SC65F
-
การบริโภคในปัจจุบันสูงสุด 100mA
-
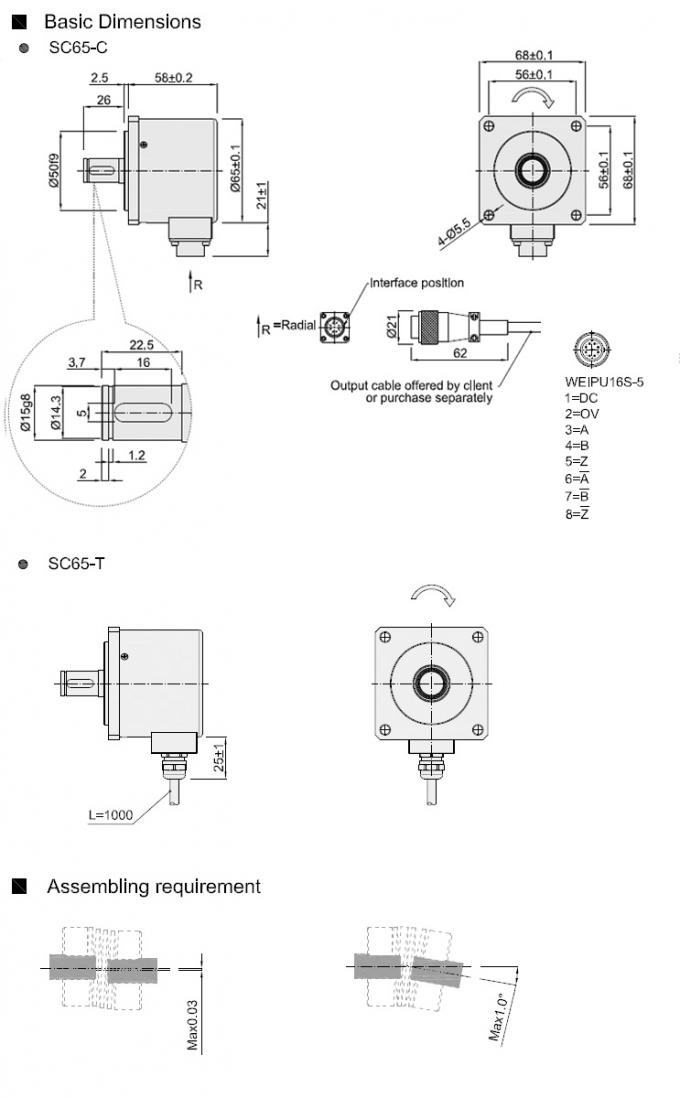
ความยาวเพลา26mm
-
เกรดการป้องกันIP50; IP65
-
เฟสเอาต์พุตเฟส A +, B +, Z +, A- B- Z-
-
ช่วงเวลา Intertiaน้อยกว่า 100x 10-6kg.m2
-
จ่ายแรงดันไฟฟ้าDC5V; DC8-30V
-
ความแข็งแรงของฉนวนAC500V 60 วินาที
-
สถานที่กำเนิดเซี่ยงไฮ้ จีน
-
ชื่อแบรนด์HENGXIANG
-
ได้รับการรับรองCE,ISO9001
-
หมายเลขรุ่นSC65F ซีรี่ส์เข้ารหัสแบบหมุนแสง
-
จำนวนสั่งซื้อขั้นต่ำอาจเป็น 1 ชิ้นเข้ารหัสเพื่อเริ่มสั่งซื้อครั้งแรก
-
ราคาnegotiable
-
รายละเอียดการบรรจุแต่ละ 1 ชิ้นถูกบรรจุในกล่องกระดาษกล่องเดียว
-
เวลาการส่งมอบ3-5 วันทำการสำหรับการสั่งซื้อตัวอย่าง 7-15 วันทำการสำหรับการสั่งซื้อจำนวนมาก
-
เงื่อนไขการชำระเงินD / A, D / P, T / T, wester N Union, บัตรเครดิต, มาสเตอร์การ์ด, Paypal, ฯลฯ
-
สามารถในการผลิต100K ชิ้นต่อปี
อุณหภูมิในการทำงาน -40 - + 90 ℃ SC65F


เกี่ยวกับ Encoder Vibration
การสั่นที่กระทำต่อตัวเข้ารหัสจะทำให้เกิดการเต้นของชีพจรอย่างผิดปกติได้ง่าย
ดังนั้นเราต้องให้ความสำคัญกับสถานที่ทำงานของเครื่องเข้ารหัส
พัลส์ต่อรอบมากขึ้นระยะห่างที่แคบลงของตะแกรงผลของการเข้ารหัสด้วยการสั่นสะเทือนเมื่อความเร็วมอเตอร์ต่ำหรือหยุดการสั่นสะเทือนที่กระทำบนเพลาตัวเข้ารหัสหรือตัวเข้ารหัสจะทำให้เกิดการสั่นสะเทือนแบบนี้ สัญญาณพัลส์
Feather ของ SC65F encoder
ยี่ห้อ: HENGXIANG
ประเภทตัวเข้ารหัส: ตัวเข้ารหัสส่วนเพิ่ม
เส้นผ่าศูนย์กลางภายนอก: 65 มม
ขนาดหน้าแปลน: 68 มม. x 68 มม
ความยาวเพลา: 26 มม
เส้นผ่าศูนย์กลางเพลาแข็ง: 15 มม. (KEYWAY 5mm)
แรงดันไฟฟ้าโหลด: ≤DC30V
GND: ไม่ได้เชื่อมต่อกับโปรแกรมเปลี่ยนไฟล์
ความสามารถในการผลิตของเครื่องเข้ารหัสโรงงาน
5,000 ชิ้นต่อเดือน
-------- กำลังการผลิตสายการผลิต
50,000 ชิ้นต่อปี
-------- หน่วยผลิตจริง (ปีก่อนหน้า)
ทำไมถึงเลือกพวกเรา?
แบรนด์ HENGXIANG - พันธมิตรที่น่าเชื่อถือ
CE ได้รับการอนุมัติ - คุณภาพของผลิตภัณฑ์ที่ได้เปรียบ;
จัดส่งที่รวดเร็ว - ความสามารถของผลิตภัณฑ์ที่แข็งแกร่ง
โรงงานโดยตรงให้ราคาที่แข่งขัน;
บริการแบบครบวงจร - เพื่อประสบการณ์การซื้อที่มีประสิทธิภาพของคุณ
การออกแบบ OEM ได้รับการยอมรับ - การออกแบบที่กำหนดเองแบรนด์ของคุณเองได้รับการยอมรับ
ลักษณะของตัว เข้ารหัส SC65F
| รายการ | พารามิเตอร์พื้นฐาน |
| ยี่ห้อ | HENGXIANG |
| ประเภทตัวเข้ารหัส | ตัวเข้ารหัสส่วนเพิ่ม |
| เส้นผ่านศูนย์กลางภายนอก | 65mm |
| ความหนา | 58 มม |
| ขนาดหน้าแปลน | 68 มม. x 68 มม |
| มิติการติดตั้ง | 56 มม. x 56 มม |
| ความยาวเพลา | 26mm |
| เส้นผ่าศูนย์กลางเพลาแข็ง | 15 มม. (KEYWAY 5mm) |
| มติ | 50; 60; 100; 200; 250; 256; 300; 360; 400; 450; 500; 512; 600; 720 1000 |
| 1000 1024; 1200; 1250; 1440; 1800; 2000; 2048; 2500; 2880; 3000; | |
| 3600; 4000; 4096; 5000; 5760; 8192; 10000; 11520; 16384; 20000; 23040 | |
| เฟสเอาต์พุต | เฟส A +, B +, Z +, A- B- Z- |
| จ่ายแรงดันไฟฟ้า | DC5V; DC8-30V |
| GND | ไม่เชื่อมต่อกับโปรแกรมเปลี่ยนไฟล์ |
| อัตราส่วนมาร์คต่ออวกาศ | 45% ถึง 55% |
| แรงบิดเริ่มต้น | น้อยกว่า 10m Nm |
| ช่วงเวลา Intertia | น้อยกว่า 3x 10-6kg.m2 |
| โหลดเพลา | รัศมี 30N; Axial 20N |
| REV ยอดนิยม | 5000RPM; IP65≤3000 RPM |
| แบริ่งชีวิต | 1.5x109 revs ที่โหลดพิกัด (100000hrs ที่ 2500RPM) |
| อุณหภูมิสิ่งแวดล้อม | ระบบปฏิบัติการ: -20 ~ + 80 °; ที่เก็บ: -25 ~ + 85 ° |
| ความชื้นในสิ่งแวดล้อม | การดำเนินงานและการเก็บรักษา: 35-85% RH (ไม่กลั่นตัว) |
| สั่นสะเทือน (ทน) | ความกว้าง 0.75 มม., 5-55Hz, 2 ชั่วโมงสำหรับสามแกนแยกกัน |
| ถุงเท้า (ทน) | 490m / s2, 11 ms สามครั้งสำหรับทิศทาง X, Y, Z แยกกัน |
หลักการเข้ารหัส
ความแม่นยำ DNL คือข้อผิดพลาดมุมเฟสเป็นค่าสัมบูรณ์ที่กำหนดในองศา (เชิงกล)
เอ็นโค้ดเดอร์ที่เพิ่มขึ้นจะส่งเอาต์พุตจำนวนพัลส์ที่กำหนดต่อการปฏิวัติดังนั้นคาดว่าพัลส์ทุกอันจะอยู่ในตำแหน่งเชิงกลที่กำหนดไว้ ความเบี่ยงเบนสูงสุดระหว่างตำแหน่งในอุดมคตินี้และตำแหน่งจริงเรียกว่า integral non linearity (INL) ความถูกต้องของ INL เป็นค่าที่สำคัญหากมีการใช้ตัวเข้ารหัสแบบเพิ่มหน่วยสำหรับการจัดตำแหน่งงาน
รอบการทำงานอธิบายถึงอัตราส่วนระหว่างเวลา“ สูง” ถึงเวลา“ ต่ำ” ของเครื่องเข้ารหัสแบบเพิ่มหน่วย โดยทั่วไปอัตราส่วนนี้คือ 50/50 ซึ่งเทียบเท่ากับ 180 el °สูงและ 180 el °ต่ำ
ประสิทธิภาพของเครื่องเข้ารหัสแบบเพิ่มหน่วยแม่เหล็กจะเพิ่มขึ้นตามการตั้งค่า PPR ที่สูงขึ้นและความเร็วรอบการหมุนที่สูงขึ้น (RPM) นี่คือตรงกันข้ามกับตัวเข้ารหัสแสงที่ประสิทธิภาพลดลง ความแม่นยำของ DNL และ INL ที่ระบุไว้ในเอกสารข้อมูลของเราคือค่าตัวพิมพ์ที่แย่ที่สุดซึ่งคาดว่าจะมีประสิทธิภาพที่ดีกว่าสำหรับ PPR และ RPM ที่สูง
นี่คือความถี่สูงสุดที่เครื่องเข้ารหัสสามารถส่งออกผ่านสายสัญญาณออกได้
ตัวอย่างเช่นความถี่ของตัวเข้ารหัส 1024 PPR ที่หมุนที่ 600 RPM คือ 200 Hz (200 * 1024 / 60s)
ผลิตภัณฑ์ของเรามีจำหน่ายทั่วโลก คุณสามารถวางใจได้ในกระบวนการผลิตทั้งหมดของเรา