
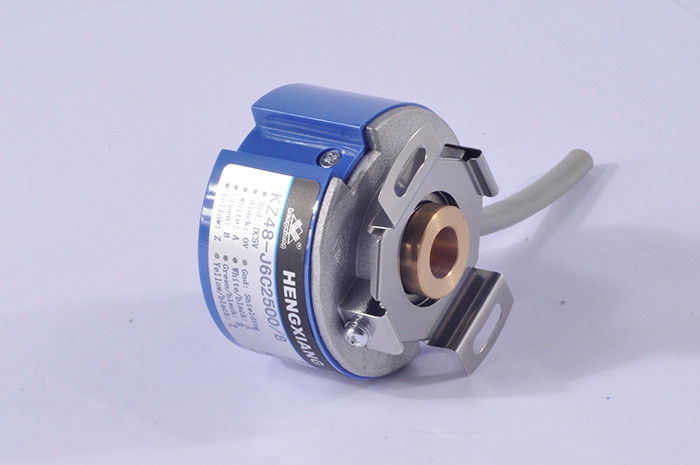
KZ48 เซอร์โวมอเตอร์ตัวเข้ารหัสแบบหมุนเพลาเรียว 9 มม. 4096 ความละเอียด 8 เสา Line Driver 26LS31 A-ZKD-12-250BM / 2P-G05L-C
-
แสงสูง
ตัวเข้ารหัสเพลามอเตอร์ออปติคอล
,เข้ารหัสแบบหมุน cnc
-
ประเภทตัวเข้ารหัสKZ48 เซอร์โวมอเตอร์ตัวเข้ารหัสแบบหมุนเพลาเรียว 9 มม. 4096 ความละเอียด 8 เสา Line Driver 26LS31 A-ZKD
-
เส้นผ่านศูนย์กลางของรูเพลา9 มม. (เรียว 1:10)
-
ประเภทเพลากลวงเพลารูปกรวยกลวง
-
มติ50ppr (ต่ำสุด) ถึง 8192ppr (สูงสุด)
-
ความยาวสายเคเบิล500mm
-
แรงดันไฟฟ้าเสริมDC5V และ DC8-30V
-
โหลดเพลาRadial 50N; เรเดียล 50N; Axial 30N แกน 30N
-
น้ำหนักสุทธิประมาณ 140g (พร้อมแพ็คเกจ)
-
สถานที่กำเนิดเซี่ยงไฮ้ จีน
-
ชื่อแบรนด์HENGXIANG
-
ได้รับการรับรองCE,ISO9001
-
หมายเลขรุ่นKZ48 เซ็นเซอร์ฮอลล์เข้ารหัสแบบหมุน
-
จำนวนสั่งซื้อขั้นต่ำ1 ชิ้นเพื่อเริ่มต้นการสั่งซื้อ
-
ราคาnegotiable
-
รายละเอียดการบรรจุแต่ละ 1 ชิ้นถูกบรรจุในกล่องกระดาษกล่องเดียว
-
เวลาการส่งมอบ3-5 วันทำการสำหรับการสั่งซื้อตัวอย่าง 7-15 วันทำการสำหรับการสั่งซื้อจำนวนมาก
-
เงื่อนไขการชำระเงินD / A, D / P, T / T, wester N Union, บัตรเครดิต, มาสเตอร์การ์ด, Paypal, ฯลฯ
-
สามารถในการผลิต100K ชิ้นต่อปี
KZ48 เซอร์โวมอเตอร์ตัวเข้ารหัสแบบหมุนเพลาเรียว 9 มม. 4096 ความละเอียด 8 เสา Line Driver 26LS31 A-ZKD-12-250BM / 2P-G05L-C

KZ48 เซอร์โวมอเตอร์ตัวเข้ารหัสแบบหมุนเพลาเรียว 9 มม. 4096 ความละเอียด 8 เสา Line Driver 26LS31 A-ZKD-12-250BM / 2P-G05L-C
เวลานำ
3-5 วันทำการสำหรับตัวอย่างหลังจากชำระเงินเต็มจำนวน
7-15 วันสำหรับการผลิตจำนวนมากหลังจากชำระเงินเต็มจำนวน
ขั้นตอนการชำระเงิน:
1. T / T สหภาพตะวันตกบัตรเครดิต Paypal ฯลฯ
2. 3-5 วันทำการหลังจากได้รับเงิน
3. ตัวเข้ารหัสจะถูกจัดส่งเมื่อพร้อม
ความสามารถในการผลิตตัวเข้ารหัสจากโรงงาน
5,000 ชิ้นต่อเดือน
-------- กำลังการผลิตสายการผลิต
50000 ชิ้นต่อปี
-------- หน่วยผลิตจริง (ปีก่อนหน้า)
ข้อมูลพื้นฐานผลิตภัณฑ์ของตัวเข้ารหัส KZ48
| รายการ | พารามิเตอร์พื้นฐาน |
| ยี่ห้อ | เฮงเซียง |
| ประเภทตัวเข้ารหัส | ตัวเข้ารหัสที่เพิ่มขึ้น |
| ประเภทเต้าเสียบ | สายเคเบิลออกจากด้านข้าง |
| โหมดเอาต์พุต | NPN / PNP (เอาต์พุตเปิดตัวสะสม) |
| เอาท์พุทแรงดันไฟฟ้า | |
| เอาต์พุตแบบกด - ดึง | |
| line drive (26LS31) TTL | |
| ไลน์ไดรฟ์ (DC8-30V) HTL | |
| TTL (DC5V) เฟส ABZ อยู่ด้านหลังของเฟส UVW | |
| เกรดการป้องกัน | IP40 |
| ความยาวสายเคเบิล | 500 มม |
| การบริโภคในปัจจุบัน | สูงสุด 100mA |
| ความถี่ในการตอบสนองสูงสุด | 300 กิโลเฮิร์ตซ์ |
| การกระเพื่อมที่อนุญาต | ≤3% rms |
| โหลดแรงดันไฟฟ้า | ≤DC30V |
| ความแข็งแรงของฉนวน | AC500V 60 วินาที |
| ความต้านทานของฉนวน | 10MΩ |
| GND | ไม่เชื่อมต่อกับตัวเข้ารหัส |
| อัตราส่วนเครื่องหมายต่อพื้นที่ | 45% ถึง 55% |
| แรงบิดเริ่มต้น | น้อยกว่า 9.8x 10-3 Nm |
| โมเมนต์ Intertia | น้อยกว่า 6.5x 10-6kg.m2 |
| โหลดเพลา | เรเดียล 50N;แกน 30N |
| REV ยอดนิยม | 5000 รอบต่อนาที |
| แบกชีวิต | 1.5x109 รอบที่โหลดพิกัด (100000 ชม. ที่ 2500RPM) |
| อุณหภูมิสิ่งแวดล้อม | การทำงาน: -20 ~ + 80 °; การจัดเก็บ: -25 ~ + 90 ° |
| ความชื้นในสิ่งแวดล้อม | การใช้งานและการจัดเก็บ: 35-85% RH (ไม่มีการควบแน่น) |
| การสั่นสะเทือน (ทน) | แอมพลิจูด 0.75 มม., 5-55Hz, 2 ชั่วโมงสำหรับสามแกนแยกกัน |
| ถุงเท้า (ทน) | 490m / s2, 11 ms สามครั้งสำหรับทิศทาง X, Y, Z แยกกัน |
| วัสดุ | อลูมิเนียมหล่อ |
| การรับรอง | ซี |
| แพ็คเกจ | กล่องกระดาษ |
| น้ำหนักสุทธิ | ประมาณ 140g (พร้อมแพ็คเกจ) |
หมายเลขชิ้นส่วนที่เกี่ยวข้องของตัวเข้ารหัส KZ48
KZ48-J3FH1024
KZ48-J4E1200
KZ48-J6C2000
KZ48-J12E1000 / 4
KZ48-J2C2500
KZ48-J3V3600
KZ48-J4C4096
KZ48-J6E5000
KZ48-J12C1024 / 4
KZ48-J12E1200 / 6
KZ48-J12C2048 / 8
![]()
เกี่ยวกับ Encoder Vibration
การสั่นสะเทือนที่กระทำกับตัวเข้ารหัสทำให้เกิดพัลส์ผิดได้ง่ายเสมอ
ดังนั้นเราจึงต้องให้ความสำคัญกับสถานที่ทำงานของตัวเข้ารหัส
ยิ่งพัลส์ต่อรอบมากขึ้นระยะห่างของตะแกรงที่แคบลงผลกระทบของแร่ต่อตัวเข้ารหัสโดยการสั่นสะเทือนเมื่อความเร็วของมอเตอร์ต่ำหรือหยุดลงการสั่นสะเทือนที่เกิดขึ้นกับเพลาตัวเข้ารหัสหรือเปลือกของตัวเข้ารหัสจะทำให้เกิดการสั่นของตะแกรงด้วยวิธีนี้ตัวเข้ารหัสอาจแสดงผิด สัญญาณชีพจร
ผลิตภัณฑ์ของเรามีจำหน่ายทั่วโลก คุณสามารถวางใจได้ในกระบวนการผลิตทั้งหมดของเรา