
ผ่านรู 16 มม. Heavy Duty Encoder K58 Encoder 28800 Pulse Line Output Output
-
แสงสูง
ตาแมว rotary encoder
,rotary rotary encoder
-
Keywardsเอนโค้ดเดอร์รูรับแสงขนาดใหญ่
-
ระลอกที่อนุญาต≤3% RMS
-
การบริโภคในปัจจุบันสูงสุด 100mA
-
เส้นผ่าศูนย์กลางเพลากลวง15mm, 16mm, 18mm; 20mm; 22mm
-
มติ1,000ppr (ต่ำสุด) ถึง 28800ppr (สูงสุด)
-
ความถี่ในการตอบกลับสูงสุด300KHZ
-
น้ำหนักสุทธิประมาณ 150 กรัม (พร้อมแพคเกจ)
-
ได้รับการรับรองCE,ISO9001
-
สถานที่กำเนิดเซี่ยงไฮ้ จีน
-
ชื่อแบรนด์HENGXIANG
-
ได้รับการรับรองCE,ISO9001
-
หมายเลขรุ่นK58 ตัวเข้ารหัสแบบหมุนเพลากลวง
-
จำนวนสั่งซื้อขั้นต่ำ1 ชิ้น encoder เพื่อเริ่มสั่งซื้อ
-
ราคาnegotiable
-
รายละเอียดการบรรจุแต่ละ 1 ชิ้นถูกบรรจุในกล่องกระดาษกล่องเดียว
-
เวลาการส่งมอบ3-5 วันทำการสำหรับการสั่งซื้อตัวอย่าง 7-15 วันทำการสำหรับการสั่งซื้อจำนวนมาก
-
เงื่อนไขการชำระเงินD / A, D / P, T / T, wester N Union, บัตรเครดิต, มาสเตอร์การ์ด, Paypal, ฯลฯ
-
สามารถในการผลิต100K ชิ้นต่อปี
ผ่านรู 16 มม. Heavy Duty Encoder K58 Encoder 28800 Pulse Line Output Output


แนะนำตัวเข้ารหัสแบบหมุน K58 อย่างง่าย
ประเภทตัวเข้ารหัส: ตัวเข้ารหัสส่วนเพิ่ม
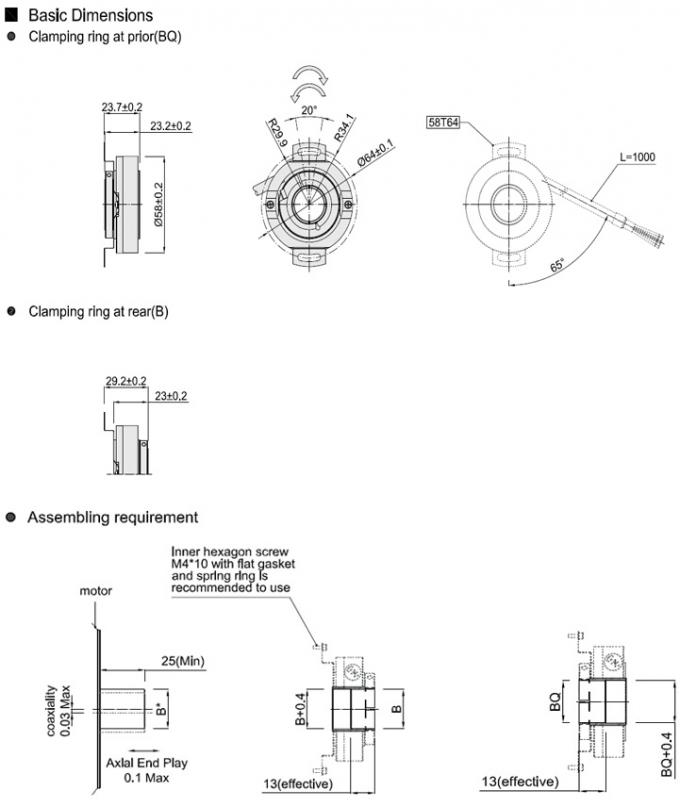
เส้นผ่าศูนย์กลางภายนอก: 58 มม
ความหนา: 24 มม
มิติการติดตั้ง: R34.1mm (แผ่นสปริง 58T64)
ประเภทเพลากลวง: แหวนหนีบที่ก่อนหน้าหรือแหวนหนีบที่ด้านหลัง
เส้นผ่าศูนย์กลางเพลากลวง: 15mm, 16mm, 18mm; 20mm; 22mm
เพลาโหลด: รัศมี 50N; Axial 30N
แบริ่งชีวิต: 1.5x109 revs ที่โหลดพิกัด (100000hrs ที่ 2500RPM)
ข้อกำหนดสำหรับ K58 ซีรีส์
| รายการ | พารามิเตอร์พื้นฐาน |
| ยี่ห้อ | HENGXIANG |
| ประเภทตัวเข้ารหัส | ตัวเข้ารหัสส่วนเพิ่ม |
| เส้นผ่านศูนย์กลางภายนอก | 58 มม |
| ความหนา | 24mm |
| ระลอกที่อนุญาต | ≤3% RMS |
| โหลดแรงดันไฟฟ้า | ≤DC30V |
| GND | ไม่เชื่อมต่อกับโปรแกรมเปลี่ยนไฟล์ |
| อัตราส่วนมาร์คต่ออวกาศ | 45% ถึง 55% |
| แรงบิดเริ่มต้น | น้อยกว่า 9.8 x 10-3 Nm |
| ช่วงเวลา Intertia | น้อยกว่า 6.5x 10-6kg.m2 |
| โหลดเพลา | รัศมี 50N; Axial 30N |
| REV ยอดนิยม | 3000RPM |
| แบริ่งชีวิต | 1.5x109 revs ที่โหลดพิกัด (100000hrs ที่ 2500RPM) |
| อุณหภูมิสิ่งแวดล้อม | ระบบปฏิบัติการ: -20 ~ + 85 °; ที่เก็บ: -25 ~ + 90 ° |
| ความชื้นในสิ่งแวดล้อม | การดำเนินงานและการเก็บรักษา: 35-85% RH (ไม่กลั่นตัว) |
| สั่นสะเทือน (ทน) | ขนาด 1.52 มม., 5-55Hz, 2 ชั่วโมงสำหรับสามแกนแยกกัน |
| ถุงเท้า (ทน) | 980m / s2, 11 ms สามครั้งสำหรับทิศทาง X, Y, Z แยกกัน |
| วัสดุเพลา | เหล็กกล้าไร้สนิม |
| วัสดุเปลือก | อลูมิเนียมหล่อ |
| ความยาวสายเคเบิล | 1,000 มม. (สายเคเบิลพร้อมที่หุ้ม) |
| เกรดการป้องกัน | IP50 |
| ความยาวสายเคเบิล | 1M (ความยาวสายเคเบิลสามารถเพิ่มได้อย่างเหมาะสมโดย |
| ต้องการ แต่ต้องชำระเป็นรายบุคคล) | |
| การรับรอง | CE |
| บรรจุภัณฑ์ | กล่องกระดาษ |
| น้ำหนักสุทธิ | ประมาณ 150 กรัม (พร้อมแพคเกจ) |
หลักการเข้ารหัส
เอาต์พุตที่แตกต่างกันมีความสามารถในการตอบสนองความถี่สูงสุดและภูมิคุ้มกันเสียงที่ดีที่สุด เพื่อให้มั่นใจว่าผู้รับควรเป็นคนละคนกัน
การเปลี่ยนไดรเวอร์เอาต์พุตเก่า
ลอจิกเกตตีความแรงดันไฟฟ้าอินพุตที่แน่นอนว่าสูง (ลอจิก 1) หรือต่ำ (ลอจิก 0)
TTL (ทรานซิสเตอร์ - ทรานซิสเตอร์ - ลอจิก): สัญญาณที่สูงกว่า 2 V ถูกตีความว่าเป็นลอจิก 1 และสัญญาณที่น้อยกว่า 0.8 V ถูกตีความเป็นลอจิก 0 ช่วงแรงดันเอาต์พุตระหว่าง 0-5 V
HTL (high-threshold-logic-ตรรกะ): สัญญาณที่สูงกว่า 3 V เป็นลอจิก 1 และสัญญาณที่น้อยกว่า 1 V เป็นลอจิก 0 ระดับสัญญาณเอาต์พุตที่สูงขึ้นอยู่กับแรงดันไฟฟ้าของแหล่งจ่าย เนื่องจากความแตกต่างของแรงดันไฟฟ้าที่สูงขึ้นระหว่างลอจิก 0 และ 1 ลอจิก HTL จึงมีภูมิคุ้มกันต่อการรบกวนและต้านทานสัญญาณรบกวนไฟฟ้าได้มากขึ้น
Mechanical degree เป็นการหมุนจริงของเพลาเป็นองศา ระดับไฟฟ้าใช้สำหรับสัญญาณไฟฟ้า เวลาที่ต้องใช้สำหรับทำแรงดันไฟฟ้า / กระแสสลับหนึ่งรอบถูกกำหนดเป็น 360 องศาไฟฟ้า (el °) สำหรับตัวเข้ารหัสที่เพิ่มขึ้นหนึ่งรอบจะเท่ากับหนึ่งพัลส์ที่สมบูรณ์ ด้วย PPR ที่กำหนดระดับไฟฟ้าสามารถแปลงเป็นระดับเชิงกลสำหรับการเข้ารหัสที่เพิ่มขึ้นใด ๆ
เกี่ยวกับ Encoder Vibration
การสั่นที่กระทำต่อตัวเข้ารหัสจะทำให้เกิดการเต้นของชีพจรอย่างผิดปกติได้ง่าย
ดังนั้นเราต้องให้ความสำคัญกับสถานที่ทำงานของเครื่องเข้ารหัส
พัลส์ต่อรอบมากขึ้นระยะห่างที่แคบลงของตะแกรงผลของการเข้ารหัสด้วยการสั่นสะเทือนเมื่อความเร็วมอเตอร์ต่ำหรือหยุดการสั่นสะเทือนที่กระทำบนเพลาตัวเข้ารหัสหรือตัวเข้ารหัสจะทำให้เกิดการสั่นสะเทือนแบบนี้ สัญญาณพัลส์
ผลิตภัณฑ์ของเรามีจำหน่ายทั่วโลก คุณสามารถวางใจได้ในกระบวนการผลิตทั้งหมดของเรา